Appearance
ROS2基础教程 - 12 RVIZ
rviz 是 ROS 中提供的一个强大的数据可视化的工具,用于显示机器人和传感器数据,帮助开发者调试和开发机器人应用。
在 ROS2 中,在终端运行如下命令可以打开 rviz:
shell
# 打开rviz
rviz2
# 或者
ros2 run rviz2 rviz2
# 或者指定配置文件
ros2 run rviz2 rviz2 -d config_file.rviz12.1 使用rviz查看TF
运行前面的动态坐标转换的四个节点后,再打开一个终端,运行命令打开 rviz 。
打开 rviz 后,Global Options -> Fixed Frame 选择根坐标系,也就是 world :
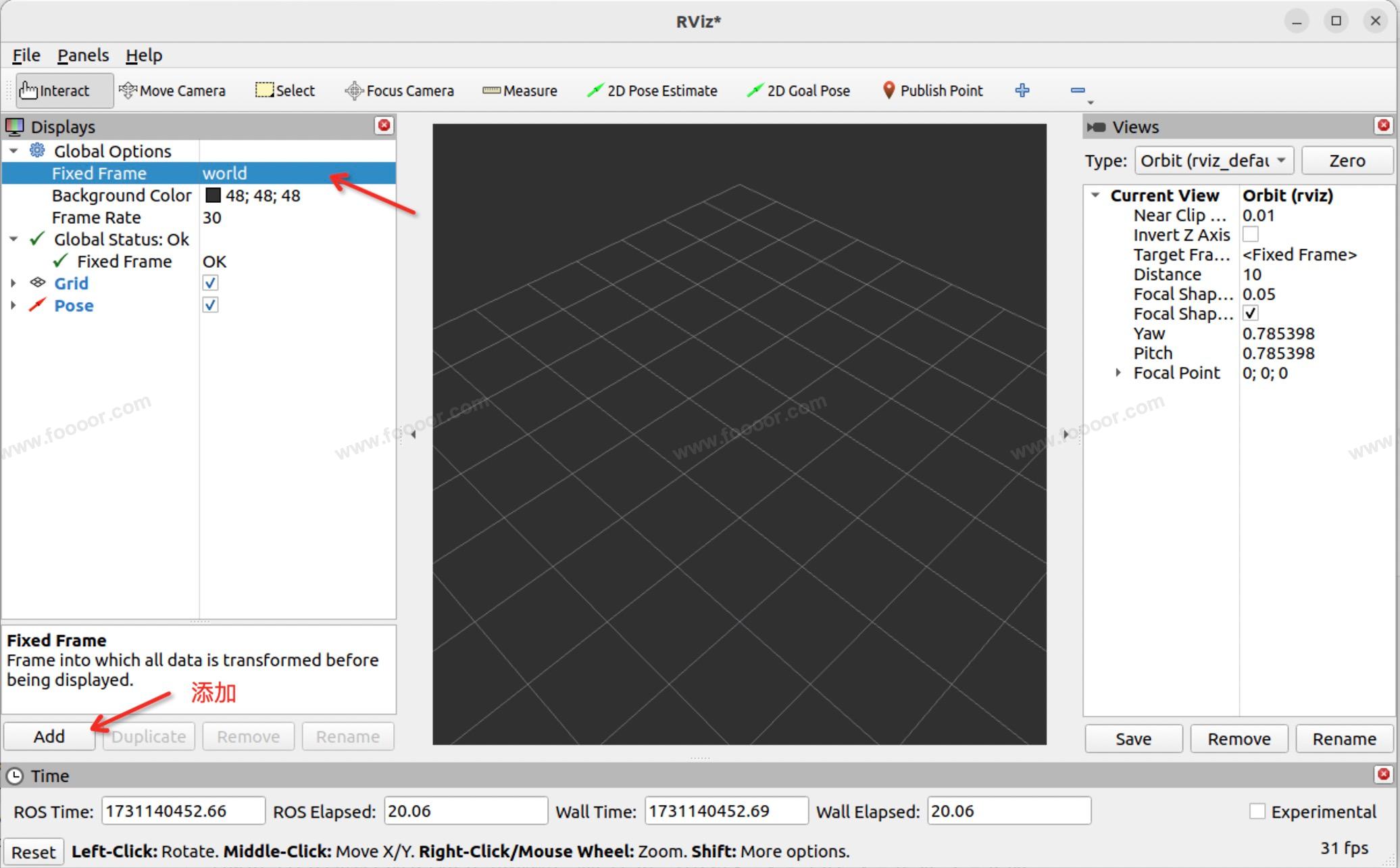
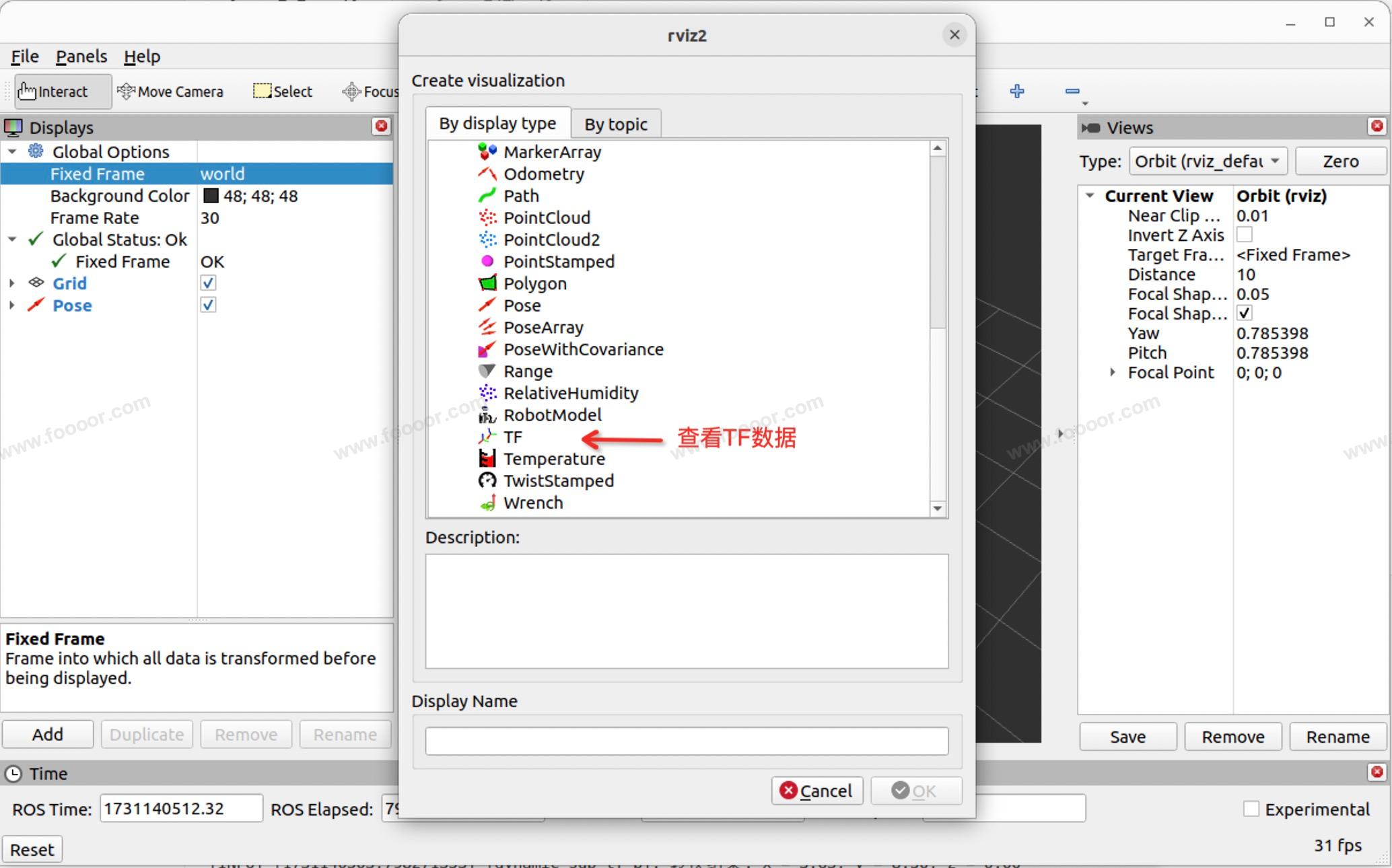
点击添加按钮,添加 TF 数据的查看:
添加完成,可以看到存在的坐标系:
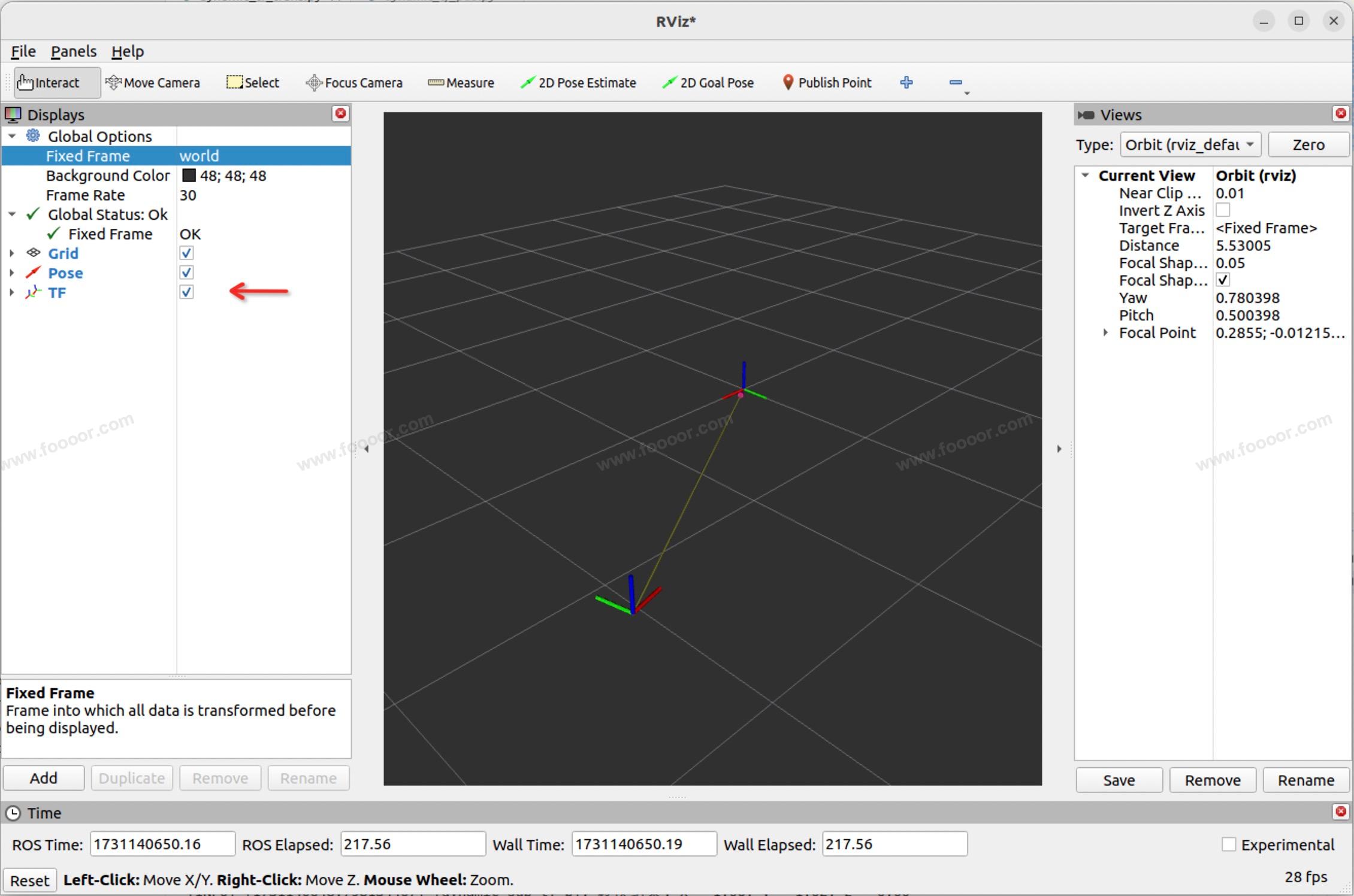
在上面的视图中,每个坐标系会有三个轴,红色表示 X 轴,绿色表示 Y 轴,蓝色表示 Z 轴。
控制小乌龟运动,可以看到 TF 跟着变化。
按住鼠标左键拖动,可以调整 rviz 视角;鼠标滚轮可以调整远近大小,按照 shift 键,然后鼠标左键拖动,可以拖动整个显示。
12.2 配置文件
每次打开 rviz 的时候,需要重新添加想要查看的数据视图,这样会很麻烦。我们可以保存 rviz 的配置,在启动 rviz 的时候指定保存的配置文件。
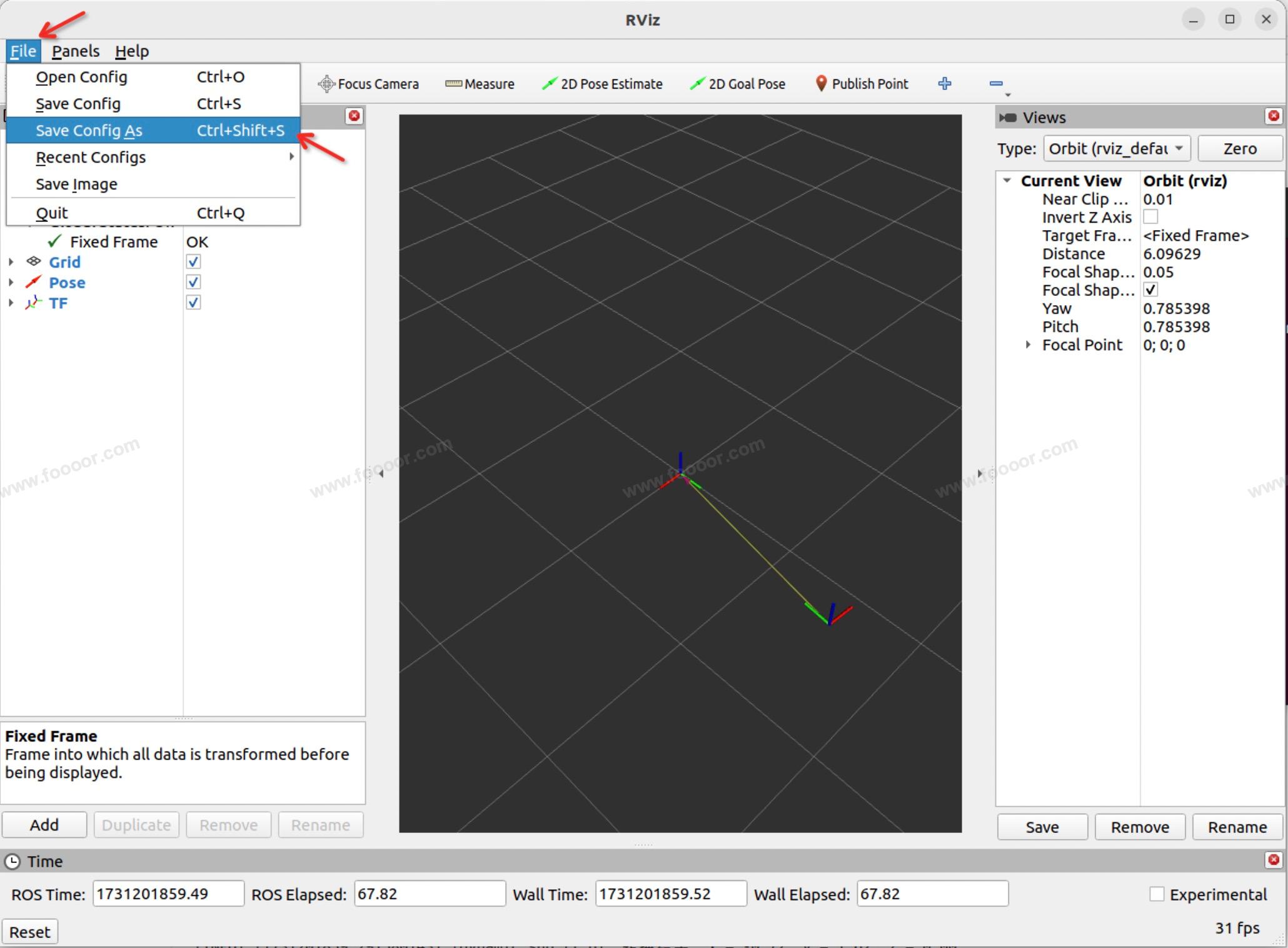
1 保存配置
添加完成自己想要查看的视图后,点击 File -> Save Config As ,保存配置文件到指定的目录,文件名称为 .rviz 结尾。
一般可以在功能包的根目录下新建一个 rviz 目录,保存 rviz 配置。
2 指定配置文件
在启动的时候指定配置文件即可:
shell
# 指定配置文件
ros2 run rviz2 rviz2 -d /home/foooor/ros2_ws/src/tf_trans_python/rviz/tf.rviz12.3 使用Launch启动rviz
在 launch 文件中启动 rviz:
python
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import os
def generate_launch_description():
# 获取launch_python功能报下的rviz目录下的tf.rviz
rviz_config_path = os.path.join(
get_package_share_directory('launch_python'),
'rviz',
'tf.rviz'
)
# 创建node
rviz = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=[
'-d', rviz_config_path
]
)
return LaunchDescription([
rviz
])